Projects
Primary Research Projects:
-
Graph Based GNSS Signal Processing
Sponsor: Air Force AFRL/RY through Mac-B
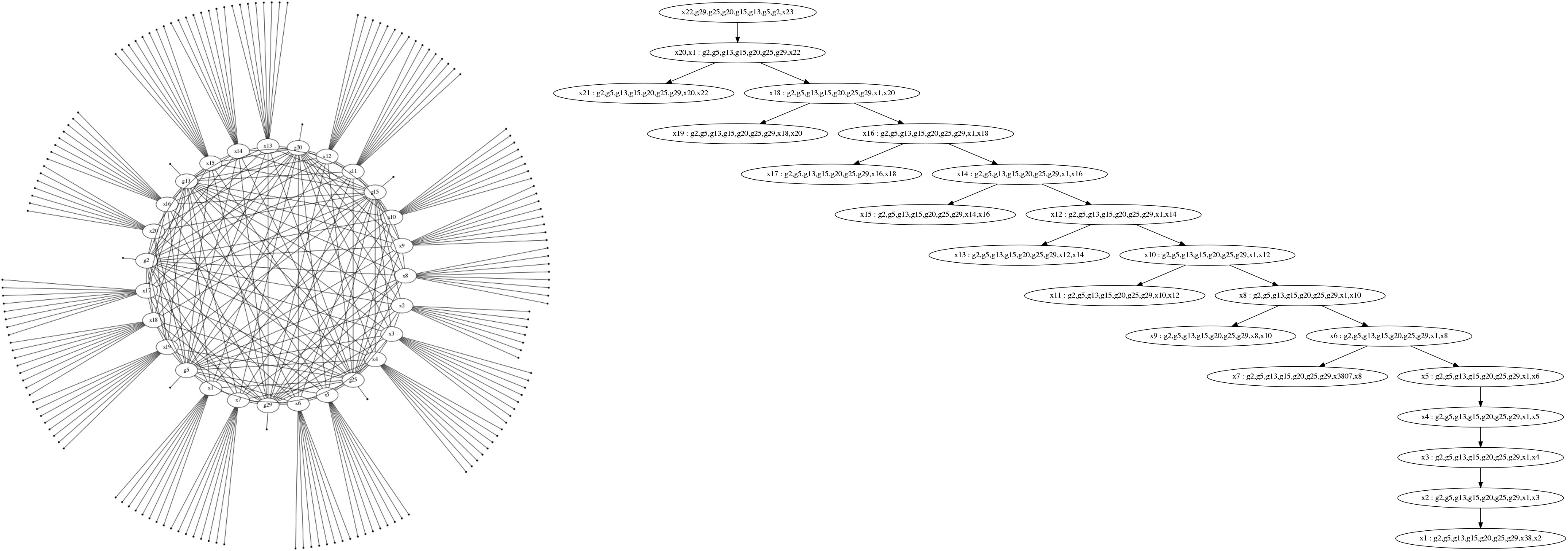
Synopsis: The objective of this work is to see how recent advances within the graph optimization community can be leveraged for GNSS signal processing.
Related Publications:
◍ Robust Navigation in GNSS Degraded Environment Using Graph Optimization. ION GNSS+ 2017
◍ Evaluation of Precise Point Positioning Convergence with an Incremental Graph Optimizer. ION PLANS 2018
Coming Soon:
◍ Robust GNSS Localization Without An Accurate Measurement Covariance Model. ION GNSS+ 2018
-
INSIGHTS: Inertial Navigation Systems Integrated into the GIPSY-OASIS for High-Accuracy Tightly Coupled Solutions
Sponsor: NASA Jet Propulsion Laboratory
Synopsis: The objective of this work is to add inertial navigation system capability into JPL's state-of-the-art GNSS processing software, Real-Time GIPSY-X.
Related Publications:
◍ Integration of Inertial Navigation into Real-Time GIPSY-X (RTGx)
◍ Characterization of Tightly-Coupled GNSS Precise Point Positioning Inertial Navigation within a Simulation Environment
◍ Precise Point Positioning Inertial Navigation Integration for Kinematic Airborne Applications
◍ Flight Data Assessment of Tightly-Coupled PPP/INS using Real-Time Products
Additional Projects:
-
Fast Traversing Autonomous Rover for Mars Sample Collection
Sponsor: NASA
Synopsis: The objective of this work is to develop and experimentally validate key technologies needed for autonomous rover traversing on Mars analog terrains
Contribution: My primary contribution is through the development of state estimation and navigation software
-
Precision Pollination Robot
Sponsor: National Robotics Initiative
Synopsis: The objective of this work is to develop and experimentally validate the effectiveness of a robot to pollinate brambles in a greenhouse environment
Contribution: My primary contribution is through the development of state estimation and navigation software. Below is an example of our robotic platform performing real-time SLAM in a structured environment --- one similar to a greenhouse.
-
Sample Return Robot Centennial Challenge
Sponsor: NASA
Synopsis: The objective of this work was to design and implemented an autonomous rover with the capability to locate and retrieve specific sample types from various locations over a wide and varied terrain and return those samples to a designated zone in a reasonable amount of time without using Earth based technologies.
Contribution: My primary contribution for the first year of the project was through the development and testing of algorithms to detect, classify, and track potential objects of interest.